David B. Lindell
Assistant Professor
Department of Computer Science
University of Toronto
I’m an Assistant Professor in the Department of Computer Science at the University of Toronto, a faculty affiliate at the Vector Institute, a faculty fellow at AXL, and a founding member of the Toronto Computational Imaging Group.
My research focuses on physically based intelligent sensing: a paradigm that combines physically based models, signal processing, and artificial intelligence to break the limits of current sensing systems and re-think how we reconstruct the world from captured visual information. Recent work in my group spans methods that recover geometry and material properties from ultrafast videos of light propagation; large-scale generative models that tackle ill-posed problems in video and 4D reconstruction; and emerging sensing systems that exploit individual photon detections and the coherent properties of light to unlock new capabilities in imaging and 3D reconstruction. My work contributes broadly to applications across computational imaging, computer graphics, computer vision, and robotics.
news
- May 2026 I'll be giving a talk at the Computational Cameras and Displays workshop at CVPR 2026.
- May 2026 Six papers accepted to CVPR, including three selected as highlights!
- Dec 2025 Two papers accepted to SIGGRAPH Asia, one paper accepted to NeurIPS, and one paper accepted to 3DV!
- Nov 2025 I'm giving a keynote at GraphQUON 2025.
- Oct 2025 I'm speaking at the UniLight Workshop, the workshop on Computer Vision with Single-Photon Cameras, and co-organizing a workshop on world models at ICCV 2025.
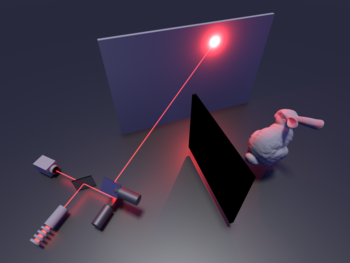
- Jun 2025 Neural Inverse Rendering from Propagating Light received the best student paper award at CVPR 2025!
- Apr 2025 I received the Ontario Early Researcher Award!
- Mar 2025 Four papers accepted to CVPR (including three selected for oral presentation!)—Opportunistic ToF, Neural Inverse Rendering with Propagating Light, CAP4D, and AC3D.
- Dec 2024 I'm speaking about neural rendering at the speed of light at the Korea AI Summit 2024.
- Sep 2024 Two papers accepted to WACV, one paper accepted to NeurIPS, one paper accepted to SIGGRAPH Asia, and two papers accepted to ICLR.
- Aug 2024 I'll be speaking at the ECCV Workshop on Neural Fields Beyond Conventional Cameras on Sep 30.
- Aug 2024 Two papers accepted to ECCV—check out Flying with Photons and TC4D.
- May 2024 I received the Sony Faculty Innovation Award and the Sony Focused Research Award!
- Mar 2024 I received the Google Research Scholar Award—a big thank you to Google Research for their support!
- Feb 2024 Three papers accepted to CVPR—congrats to Kejia, Maxx, Parsa, and Sherwin who led these projects!
- Oct 2023 Passive ultra-wideband single-photon imaging wins the best paper award (Marr Prize) at ICCV 2023!!!
- Oct 2023 Papers accepted to ICCV (oral) and NeurIPS (spotlight)!
- Sep 2023 Three new students joining the group—welcome Victor, Sherwin, and Maxx!
- Mar 2023 SparsePose accepted to CVPR 2023!
- Oct 2022 Two papers accepted to NeurIPS 2022--Check out Residual MFNs and Neural Articulated Radiance Fields!
- Mar 2022 BACON accepted to CVPR 2022!
- Dec 2021 We describe a new type of interpretible neural network with an analytical Fourier spectrum in BACON: Band-Limited Coordinate Networks.
- Aug 2021 I'm honored to receive the 2021 SIGGRAPH Outstanding Doctoral Dissertation Honorable Mention Award!
- May 2021 Our paper on scaling up implicit representations using adaptive coordinate networks is accepted to SIGGRAPH 2021!
- Mar 2021 AutoInt accepted to CVPR 2021! Code is also available here.
- Jan 2021 Officially graduated! My dissertation is entitled Computational Imaging with Single-Photon Detectors.
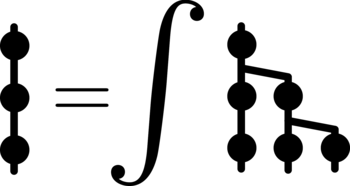
- Dec 2020 Our method to solve integral equations with neural networks is out! AutoInt: Automatic integration for fast neural volume rendering.
- Sep 2020 Our paper on [Sinusoidal Representation Networks (SIREN)](https://vsitzmann.github.io/siren/) was accepted as an oral to NeurIPS (1% acceptance rate).
- Sep 2020 My paper on imaging through scattering media was published in [Nature Communications](https://www.nature.com/articles/s41467-020-18346-3) and featured in [Stanford News](https://news.stanford.edu/2020/09/09/seeing-objects-clouds-fog/).
- Aug 2020 My thesis presentation "Computational Single-Photon Imaging" received the [honorable mention award at the SIGGRAPH Thesis Fast Forward](https://s2020.siggraph.org/conference/program-events/graduate-cohorts/thesis-fast-forward/)!
- Aug 2020 My course on [Computational time-resolved imaging, single-photon sensing, and non-line-of-sight imaging](https://dl.acm.org/doi/abs/10.1145/3388769.3407481) is live at SIGGRAPH! I'm joined by excellent instructors Matthew O'Toole, Ramesh Raskar, and Srinivas Narasimhan.
- Jul 2020
- Jul 2020 I was recognized as an [outstanding reviewer](http://cvpr2020.thecvf.com/reviewer-acknowledgements) for CVPR 2020! (136/3663 reviewers selected)
-
Jun 2020
Three papers accepted recently! Non-line-of-sight Surface Reconstruction Using the Directional Light-cone Transform (Oral @ CVPR 2020), SPADnet: deep RGB-SPAD sensor fusion assisted by monocular depth estimation (Optics Express), and Deep Adaptive LiDAR: End-to-end Optimization of Sampling and Depth Completion at Low Sampling Rates (ICCP 2020).
- May 2020 I'm co-chairing the 9th annual [Computational Cameras and Displays workshop](http://ccd2020.cms.caltech.edu/) at CVPR 2020 with [Achuta Kadambi](https://visual.ee.ucla.edu/) and [Katie Bouman](http://users.cms.caltech.edu/~klbouman/).
- Mar 2020 Update: My talk is featured on the [TED website](https://go.ted.com/davidlindell) with nearly a quarter million views!
- Jan 2020 My TedxBeaconStreet talk on "a camera to see around corners" is up on [YouTube](https://www.youtube.com/watch?v=ytxZc1WBtjI)!
-
May 2019
Two papers accepted! Acoustic Non-Line-of-Sight Imaging was accepted as an oral to CVPR, and Wave-Based Non-Line-of-Sight Imaging Using Fast f-k Migration was accepted to SIGGRAPH.
- Jun 2018 I'm interning at the Intelligent Systems Lab at Intel this summer with [Vladlen Koltun](http://vladlen.info).
- Mar 2018 Our paper on Seeing around corners was published in [Nature](http://rdcu.be/ImAZ)!
recent press coverage
-
 Veritasium · Jan 2026What Happens If You Keep Slowing Down?
Veritasium · Jan 2026What Happens If You Keep Slowing Down? -
 U of T News · Nov 2024Light in a bottle: U of T researchers use AI to capture photons in motion
U of T News · Nov 2024Light in a bottle: U of T researchers use AI to capture photons in motion
selected publications



 ACM Trans. Graph. (SIGGRAPH Asia), 2025
ACM Trans. Graph. (SIGGRAPH Asia), 2025 CVPR, 2025 (Best Student Paper Award)
CVPR, 2025 (Best Student Paper Award)
 CVPR, 2025 (Oral Presentation)
CVPR, 2025 (Oral Presentation)
 ECCV, 2024 (Oral Presentation)
ECCV, 2024 (Oral Presentation) ICCV, 2023 (Best Paper/Marr Prize)
ICCV, 2023 (Best Paper/Marr Prize)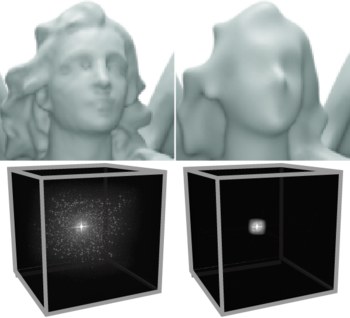 CVPR, 2022 (Oral Presentation)
CVPR, 2022 (Oral Presentation) Nature Communications, 2020 (2020 Top 50 Physics Articles)
Nature Communications, 2020 (2020 Top 50 Physics Articles) NeurIPS, 2020 (Oral Presentation)
NeurIPS, 2020 (Oral Presentation) ACM Trans. Graph. (SIGGRAPH), 2019
ACM Trans. Graph. (SIGGRAPH), 2019